ຈອງສື່ສັງຄົມຂອງພວກເຮົາສຳລັບໂພສທີ່ວ່ອງໄວ
ເຄື່ອງວັດແທກການໝຸນເລເຊີວົງແຫວນ (RLGs) ໄດ້ມີຄວາມກ້າວໜ້າຢ່າງຫຼວງຫຼາຍນັບຕັ້ງແຕ່ການເລີ່ມຕົ້ນຂອງມັນ, ເຊິ່ງມີບົດບາດສຳຄັນໃນລະບົບນຳທາງ ແລະ ການຂົນສົ່ງທີ່ທັນສະໄໝ. ບົດຄວາມນີ້ຈະພິຈາລະນາເຖິງການພັດທະນາ, ຫຼັກການ, ແລະ ການນຳໃຊ້ RLGs, ໂດຍເນັ້ນໃຫ້ເຫັນເຖິງຄວາມສຳຄັນຂອງພວກມັນໃນລະບົບນຳທາງແບບ inertial ແລະ ການນຳໃຊ້ຂອງມັນໃນກົນໄກການຂົນສົ່ງຕ່າງໆ.
ການເດີນທາງທາງປະຫວັດສາດຂອງ Gyroscopes
ຈາກແນວຄວາມຄິດໄປສູ່ການນຳທາງທີ່ທັນສະໄໝ
ການເດີນທາງຂອງເຄື່ອງວັດແທກການໝຸນໄດ້ເລີ່ມຕົ້ນດ້ວຍການຮ່ວມປະດິດເຄື່ອງວັດແທກການໝຸນເຄື່ອງທຳອິດໃນປີ 1908 ໂດຍ Elmer Sperry, ຜູ້ທີ່ໄດ້ຮັບຂະໜານນາມວ່າ "ບິດາຂອງເຕັກໂນໂລຊີການນຳທາງທີ່ທັນສະໄໝ," ແລະ Herman Anschütz-Kaempfe. ໃນໄລຍະຫຼາຍປີທີ່ຜ່ານມາ, ເຄື່ອງວັດແທກການໝຸນໄດ້ເຫັນການປັບປຸງຢ່າງຫຼວງຫຼາຍ, ເຊິ່ງເສີມຂະຫຍາຍປະໂຫຍດຂອງມັນໃນການນຳທາງ ແລະ ການຂົນສົ່ງ. ຄວາມກ້າວໜ້າເຫຼົ່ານີ້ໄດ້ເຮັດໃຫ້ເຄື່ອງວັດແທກການໝຸນສາມາດໃຫ້ຄຳແນະນຳທີ່ສຳຄັນສຳລັບການສະຖຽນລະພາບການບິນຂອງເຮືອບິນ ແລະ ເຮັດໃຫ້ການດຳເນີນງານແບບອັດຕະໂນມັດ. ການສາທິດທີ່ໂດດເດັ່ນໂດຍ Lawrence Sperry ໃນເດືອນມິຖຸນາ 1914 ໄດ້ສະແດງໃຫ້ເຫັນເຖິງທ່າແຮງຂອງການຂັບເຄື່ອນແບບອັດຕະໂນມັດດ້ວຍເຄື່ອງວັດແທກການໝຸນໂດຍການສະຖຽນລະພາບເຮືອບິນໃນຂະນະທີ່ລາວຢືນຢູ່ໃນຫ້ອງນັກບິນ, ເຊິ່ງເປັນການກ້າວກະໂດດທີ່ສຳຄັນໃນເຕັກໂນໂລຊີແບບອັດຕະໂນມັດ.
ການຫັນປ່ຽນໄປສູ່ເຄື່ອງວັດແທກການໝຸນເລເຊີແບບວົງແຫວນ
ວິວັດທະນາການຍັງສືບຕໍ່ດ້ວຍການປະດິດເຄື່ອງວັດແທກຄື້ນເລເຊີວົງແຫວນເຄື່ອງທຳອິດໃນປີ 1963 ໂດຍ Macek ແລະ Davis. ນະວັດຕະກຳນີ້ໄດ້ໝາຍເຖິງການປ່ຽນແປງຈາກເຄື່ອງວັດແທກຄື້ນກົນຈັກໄປສູ່ເຄື່ອງວັດແທກຄື້ນເລເຊີ, ເຊິ່ງສະເໜີຄວາມແມ່ນຍຳສູງກວ່າ, ການບຳລຸງຮັກສາຕ່ຳກວ່າ, ແລະ ຫຼຸດຜ່ອນຕົ້ນທຶນ. ປະຈຸບັນ, ເຄື່ອງວັດແທກຄື້ນເລເຊີວົງແຫວນ, ໂດຍສະເພາະໃນການນຳໃຊ້ທາງທະຫານ, ຄອບງຳຕະຫຼາດຍ້ອນຄວາມໜ້າເຊື່ອຖື ແລະ ປະສິດທິພາບຂອງມັນໃນສະພາບແວດລ້ອມທີ່ສັນຍານ GPS ຖືກທຳລາຍ.
ຫຼັກການຂອງເຄື່ອງວັດແທກການໝຸນເລເຊີແບບວົງແຫວນ
ເຂົ້າໃຈຜົນກະທົບຂອງ Sagnac
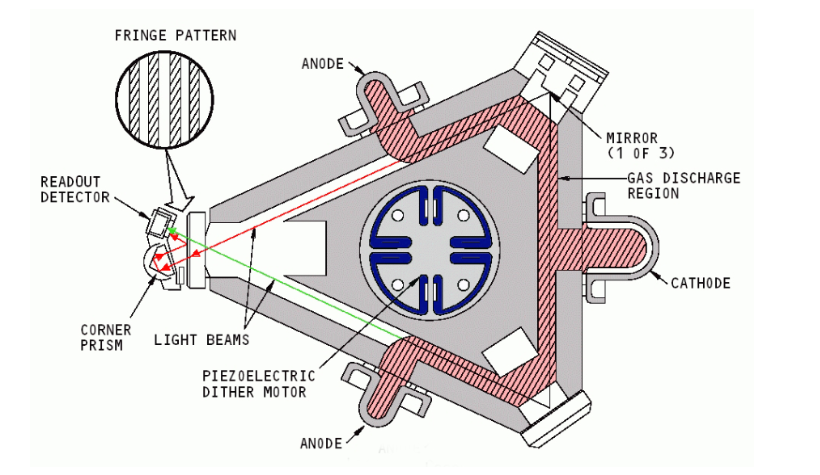
ໜ້າທີ່ຫຼັກຂອງ RLGs ແມ່ນຢູ່ໃນຄວາມສາມາດຂອງພວກມັນໃນການກຳນົດທິດທາງຂອງວັດຖຸໃນພື້ນທີ່ inertial. ສິ່ງນີ້ບັນລຸໄດ້ຜ່ານຜົນກະທົບຂອງ Sagnac, ບ່ອນທີ່ interferometer ວົງແຫວນໃຊ້ລັງສີເລເຊີທີ່ເດີນທາງໄປໃນທິດທາງກົງກັນຂ້າມອ້ອມຮອບເສັ້ນທາງປິດ. ຮູບແບບການແຊກແຊງທີ່ສ້າງຂຶ້ນໂດຍລັງສີເຫຼົ່ານີ້ເຮັດໜ້າທີ່ເປັນຈຸດອ້າງອີງທີ່ຢຸດນິ້ງ. ການເຄື່ອນໄຫວໃດໆຈະປ່ຽນແປງຄວາມຍາວຂອງເສັ້ນທາງຂອງລັງສີເຫຼົ່ານີ້, ເຊິ່ງເຮັດໃຫ້ເກີດການປ່ຽນແປງໃນຮູບແບບການແຊກແຊງທີ່ສົມສ່ວນກັບຄວາມໄວມຸມ. ວິທີການທີ່ສະຫຼາດນີ້ຊ່ວຍໃຫ້ RLGs ສາມາດວັດແທກທິດທາງດ້ວຍຄວາມແມ່ນຍຳພິເສດໂດຍບໍ່ຕ້ອງອີງໃສ່ການອ້າງອີງພາຍນອກ.
ການນຳໃຊ້ໃນການນຳທາງ ແລະ ການຂົນສົ່ງ
ປະຕິວັດລະບົບນຳທາງແບບ Inertial (INS)
RLGs ມີບົດບາດສຳຄັນໃນການພັດທະນາລະບົບນຳທາງແບບ Inertial Navigation Systems (INS), ເຊິ່ງມີຄວາມສຳຄັນຫຼາຍສຳລັບການນຳພາເຮືອ, ເຮືອບິນ ແລະ ລູກສອນໄຟໃນສະພາບແວດລ້ອມທີ່ບໍ່ມີ GPS. ການອອກແບບທີ່ກະທັດຮັດ ແລະ ບໍ່ມີແຮງສຽດທານຂອງພວກມັນເຮັດໃຫ້ພວກມັນເໝາະສົມສຳລັບການນຳໃຊ້ດັ່ງກ່າວ, ປະກອບສ່ວນເຂົ້າໃນວິທີແກ້ໄຂການນຳທາງທີ່ໜ້າເຊື່ອຖື ແລະ ຖືກຕ້ອງຫຼາຍຂຶ້ນ.
ແພລດຟອມທີ່ໝັ້ນຄົງ vs. ສາຍຮັດ INS ລົງ
ເຕັກໂນໂລຊີ INS ໄດ້ພັດທະນາໄປລວມທັງລະບົບແພລດຟອມທີ່ມີຄວາມໝັ້ນຄົງ ແລະ ລະບົບສາຍຮັດລົງ. ແພລດຟອມທີ່ມີຄວາມໝັ້ນຄົງ INS, ເຖິງວ່າຈະມີຄວາມສັບສົນທາງກົນຈັກ ແລະ ມີຄວາມອ່ອນໄຫວຕໍ່ການສວມໃສ່, ແຕ່ມັນຍັງໃຫ້ປະສິດທິພາບທີ່ແຂງແຮງຜ່ານການເຊື່ອມໂຍງຂໍ້ມູນແບບອະນາລັອກ.ໃນທາງກົງກັນຂ້າມ, ລະບົບ INS ແບບມີສາຍຮັດໄດ້ຮັບຜົນປະໂຫຍດຈາກລັກສະນະທີ່ກະທັດຮັດ ແລະ ບໍ່ຕ້ອງມີການບຳລຸງຮັກສາຂອງ RLG, ເຊິ່ງເຮັດໃຫ້ພວກມັນເປັນທາງເລືອກທີ່ນິຍົມສຳລັບເຮືອບິນທີ່ທັນສະໄໝເນື່ອງຈາກຄວາມຄຸ້ມຄ່າ ແລະ ຄວາມແມ່ນຍຳຂອງມັນ.
ການປັບປຸງການນຳທາງຂີປະນາວຸດ
ລູກສອນໄຟ RLG ຍັງມີບົດບາດສຳຄັນໃນລະບົບນຳທາງຂອງອາວຸດອັດສະລິຍະ. ໃນສະພາບແວດລ້ອມທີ່ GPS ບໍ່ໜ້າເຊື່ອຖື, RLG ໃຫ້ທາງເລືອກທີ່ໜ້າເຊື່ອຖືສຳລັບການນຳທາງ. ຂະໜາດນ້ອຍ ແລະ ຄວາມຕ້ານທານຕໍ່ກຳລັງທີ່ຮຸນແຮງຂອງພວກມັນເຮັດໃຫ້ພວກມັນເໝາະສົມກັບລູກສອນໄຟ ແລະ ລູກປືນໃຫຍ່, ຕົວຢ່າງເຊັ່ນລະບົບຕ່າງໆເຊັ່ນ: ລູກສອນໄຟລ່ອງເຮືອ Tomahawk ແລະ M982 Excalibur.

ແຜນວາດຂອງຕົວຢ່າງແພລດຟອມທີ່ມີຄວາມໝັ້ນຄົງແບບ gimbaled inertial ໂດຍໃຊ້ຕົວຍຶດ. ມາລະຍາດຂອງ Engineering 360.
ຂໍ້ປະຕິເສດຄວາມຮັບຜິດຊອບ:
- ພວກເຮົາຂໍປະກາດວ່າຮູບພາບບາງຮູບທີ່ສະແດງຢູ່ໃນເວັບໄຊທ໌ຂອງພວກເຮົາແມ່ນໄດ້ລວບລວມມາຈາກອິນເຕີເນັດ ແລະ Wikipedia, ໂດຍມີຈຸດປະສົງເພື່ອສົ່ງເສີມການສຶກສາ ແລະ ການແລກປ່ຽນຂໍ້ມູນ. ພວກເຮົາເຄົາລົບສິດທິຊັບສິນທາງປັນຍາຂອງຜູ້ສ້າງທຸກຄົນ. ການນຳໃຊ້ຮູບພາບເຫຼົ່ານີ້ບໍ່ໄດ້ມີຈຸດປະສົງເພື່ອຜົນປະໂຫຍດທາງການຄ້າ.
- ຖ້າທ່ານເຊື່ອວ່າເນື້ອຫາໃດໆທີ່ນຳໃຊ້ນັ້ນລະເມີດລິຂະສິດຂອງທ່ານ, ກະລຸນາຕິດຕໍ່ຫາພວກເຮົາ. ພວກເຮົາເຕັມໃຈທີ່ຈະໃຊ້ມາດຕະການທີ່ເໝາະສົມ, ລວມທັງການລຶບຮູບພາບ ຫຼື ການໃຫ້ຄວາມກ່ຽວຂ້ອງທີ່ເໝາະສົມ, ເພື່ອຮັບປະກັນການປະຕິບັດຕາມກົດໝາຍ ແລະ ລະບຽບການກ່ຽວກັບຊັບສິນທາງປັນຍາ. ເປົ້າໝາຍຂອງພວກເຮົາແມ່ນເພື່ອຮັກສາເວທີທີ່ອຸດົມສົມບູນດ້ວຍເນື້ອຫາ, ຍຸດຕິທຳ ແລະ ເຄົາລົບສິດທິຊັບສິນທາງປັນຍາຂອງຜູ້ອື່ນ.
- ກະລຸນາຕິດຕໍ່ພວກເຮົາຕາມທີ່ຢູ່ອີເມວຕໍ່ໄປນີ້:sales@lumispot.cnພວກເຮົາມຸ່ງໝັ້ນທີ່ຈະດຳເນີນການທັນທີເມື່ອໄດ້ຮັບແຈ້ງການໃດໆ ແລະ ຮັບປະກັນການຮ່ວມມື 100% ໃນການແກ້ໄຂບັນຫາດັ່ງກ່າວ.
ເວລາໂພສ: ເມສາ-01-2024