
ຈອງສື່ມວນຊົນສັງຄົມຂອງພວກເຮົາສໍາລັບການຕອບທັນທີ
ໃນຍຸກແຫ່ງຄວາມກ້າວໜ້າທາງດ້ານເຕັກໂນໂລຊີ, ລະບົບການນຳທາງໄດ້ກາຍເປັນເສົາຄ້ຳພື້ນຖານ, ຊຸກຍູ້ຄວາມກ້າວໜ້າຢ່າງຫຼວງຫຼາຍ, ໂດຍສະເພາະແມ່ນບັນດາຂະແໜງການທີ່ສຳຄັນ.ການເດີນທາງຈາກການນໍາທາງຊັ້ນສູງຂັ້ນພື້ນຖານໄປສູ່ລະບົບນໍາທາງ Inertial Navigation Systems (INS) ທີ່ຊັບຊ້ອນໄດ້ສະແດງໃຫ້ເຫັນເຖິງຄວາມພະຍາຍາມທີ່ຈະບໍ່ຍອມຈໍານົນຂອງມະນຸດສໍາລັບການຂຸດຄົ້ນ ແລະກໍານົດຄວາມຖືກຕ້ອງ.ການວິເຄາະນີ້ delves ເລິກເຂົ້າໄປໃນກົນຈັກ intricate ຂອງ INS, ຂຸດຄົ້ນເຕັກໂນໂລຊີກ້າວຫນ້າທາງດ້ານຂອງ Fiber Optic Gyroscopes (FOGs) ແລະບົດບາດສໍາຄັນຂອງ Polarization ໃນການຮັກສາ Fiber loops.
ສ່ວນທີ 1: ການຖອດລະຫັດລະບົບນໍາທາງ Inertial (INS):
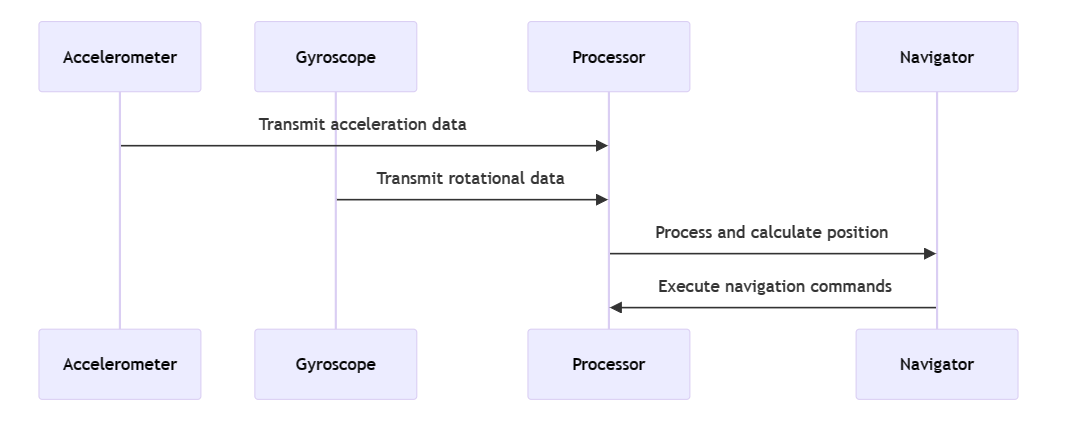
Inertial Navigation Systems (INS) ໂດດເດັ່ນເປັນເຄື່ອງຊ່ວຍໃນການນຳທາງແບບອັດຕະໂນມັດ, ຄິດໄລ່ຕຳແໜ່ງ, ການກຳນົດທິດທາງ ແລະຄວາມໄວຂອງຍານພາຫະນະຢ່າງຊັດເຈນ, ບໍ່ຂຶ້ນກັບຕົວຊີ້ບອກພາຍນອກ.ລະບົບເຫຼົ່ານີ້ປະສົມກົມກຽວກັນຂອງເຊັນເຊີການເຄື່ອນໄຫວ ແລະ rotational, ປະສົມປະສານ seamlessly ກັບຮູບແບບການຄິດໄລ່ສໍາລັບຄວາມໄວເບື້ອງຕົ້ນ, ຕໍາແຫນ່ງ, ແລະການປະຖົມນິເທດ.
A archetypal INS ກວມເອົາສາມອົງປະກອບຂອງ cardinal:
· Accelerometers: ອົງປະກອບທີ່ສໍາຄັນເຫຼົ່ານີ້ລົງທະບຽນການເລັ່ງເສັ້ນຂອງຍານພາຫະນະ, ແປການເຄື່ອນໄຫວເຂົ້າໄປໃນຂໍ້ມູນທີ່ສາມາດວັດແທກໄດ້.
· Gyroscopes: Integral ສໍາລັບການກໍານົດຄວາມໄວເປັນລ່ຽມ, ອົງປະກອບເຫຼົ່ານີ້ແມ່ນສໍາຄັນສໍາລັບການປະຖົມນິເທດລະບົບ.
· ໂມດູນຄອມພິວເຕີ: ສູນກາງເສັ້ນປະສາດຂອງ INS, ການປະມວນຜົນຂໍ້ມູນຫຼາຍຮູບຫຼາຍແບບເພື່ອໃຫ້ຜົນການວິເຄາະຕໍາແຫນ່ງໃນເວລາຈິງ.
ພູມຕ້ານທານຂອງ INS ຕໍ່ການຂັດຂວາງພາຍນອກເຮັດໃຫ້ມັນຂາດບໍ່ໄດ້ໃນຂະແຫນງການປ້ອງກັນປະເທດ.ຢ່າງໃດກໍ່ຕາມ, ມັນຕໍ່ສູ້ກັບ 'ພຽງການລອຍລົມ' - ການທໍາລາຍຄວາມຖືກຕ້ອງເທື່ອລະກ້າວ, ຈໍາເປັນຕ້ອງມີການແກ້ໄຂທີ່ຊັບຊ້ອນເຊັ່ນເຊັນເຊີ fusion ສໍາລັບການຫຼຸດຜ່ອນຄວາມຜິດພາດ (Chatfield, 1997).
ສ່ວນທີ 2. ການເຄື່ອນໄຫວດ້ານການໃຊ້ງານຂອງ Fiber Optic Gyroscope:
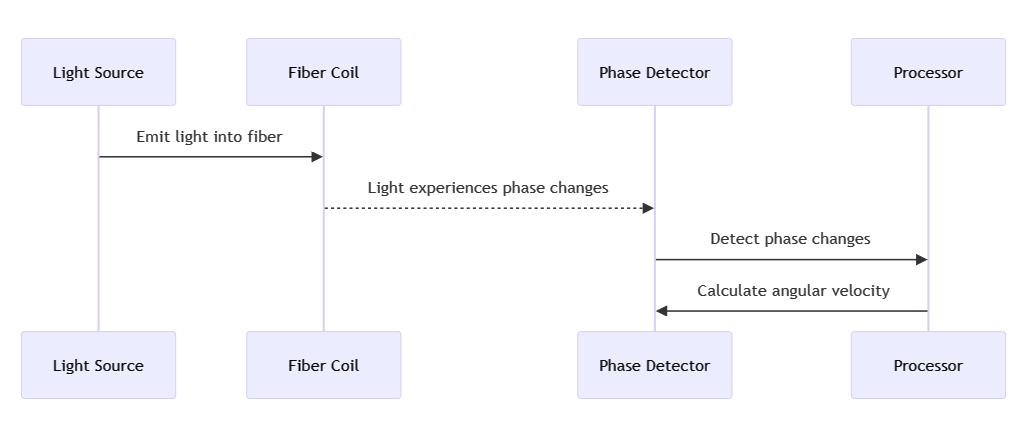
Fiber Optic Gyroscopes (FOGs) ປະກາດເຖິງຍຸກທີ່ຫັນປ່ຽນໃນການຮັບຮູ້ການໝູນວຽນ, ນຳໃຊ້ການແຊກແຊງຂອງແສງ.ດ້ວຍຄວາມຊັດເຈນຢູ່ໃນຫຼັກຂອງມັນ, FOGs ມີຄວາມສໍາຄັນສໍາລັບການສະຖຽນລະພາບແລະການນໍາທາງຂອງຍານອະວະກາດ.
FOGs ດໍາເນີນການກ່ຽວກັບຜົນກະທົບ Sagnac, ບ່ອນທີ່ແສງສະຫວ່າງ, traversing ໃນ counter directions ພາຍໃນມ້ວນເສັ້ນໄຍພືດຫມູນວຽນ, manifests a phase shift correlating with rotational rate change.ກົນໄກ nuanced ນີ້ແປເປັນວັດແທກຄວາມໄວມຸມທີ່ຊັດເຈນ.
ອົງປະກອບທີ່ສໍາຄັນປະກອບມີ:
· ແຫຼ່ງແສງ: ຈຸດເລີ່ມຕົ້ນ, ໂດຍປົກກະຕິແມ່ນເລເຊີ, ເລີ່ມຕົ້ນການເດີນທາງແສງສະຫວ່າງທີ່ສອດຄ່ອງກັນ.
· ສາຍໄຟເບີ: ເປັນທໍ່ສົ່ງ optical ມ້ວນ, ຍືດໄລຍະເສັ້ນທາງຂອງແສງ, ດັ່ງນັ້ນການຂະຫຍາຍຜົນກະທົບ Sagnac.
· ເຄື່ອງກວດຈັບພາບ: ອົງປະກອບນີ້ແນມເບິ່ງຮູບແບບການລົບກວນທີ່ສັບສົນຂອງແສງ.
ສ່ວນທີ 3: ຄວາມສໍາຄັນຂອງ Polarization ການຮັກສາເສັ້ນໄຍ Loops:
Polarization Maintaining (PM) Fiber Loops, ມີຄວາມສຳຄັນຫຼາຍສຳລັບ FOGs, ຮັບປະກັນສະພາບແສງຂົ້ວໂລກທີ່ເປັນເອກະພາບ, ເປັນຕົວກຳນົດຫຼັກໃນຄວາມແມ່ນຍໍາຂອງຮູບແບບການແຊກແຊງ.ເສັ້ນໃຍພິເສດເຫຼົ່ານີ້, ຕ້ານການກະຈາຍຂອງຮູບແບບ polarization, ຊຸກຍູ້ຄວາມອ່ອນໄຫວ FOG ແລະຄວາມແທ້ຈິງຂອງຂໍ້ມູນ (Kersey, 1996).
ການເລືອກເສັ້ນໃຍ PM, ກໍານົດໂດຍ exigencies ການດໍາເນີນງານ, ຄຸນລັກສະນະທາງກາຍະພາບ, ແລະຄວາມກົມກຽວກັນຂອງລະບົບ, ມີອິດທິພົນຕໍ່ການວັດແທກປະສິດທິພາບລວມ.
ພາກສ່ວນທີ 4: ຄໍາຮ້ອງສະຫມັກ ແລະຫຼັກຖານສະແດງຜົນ:
FOGs ແລະ INS ຊອກຫາສຽງສະທ້ອນໃນທົ່ວຄໍາຮ້ອງສະຫມັກທີ່ຫຼາກຫຼາຍ, ຈາກ orchestrating forays ທາງອາກາດທີ່ບໍ່ມີຄົນຂັບເພື່ອໃຫ້ແນ່ໃຈວ່າຄວາມຫມັ້ນຄົງ cinematic ທ່າມກາງ unpredictable ສິ່ງແວດລ້ອມ.ຫຼັກຖານສະແດງເຖິງຄວາມໜ້າເຊື່ອຖືຂອງພວກມັນແມ່ນການນຳໄປໃຊ້ໃນຍານ Mars Rovers ຂອງອົງການ NASA, ອຳນວຍຄວາມສະດວກໃຫ້ແກ່ການນຳທາງນອກໂລກທີ່ບໍ່ປອດໄພ (Maimone, Cheng, and Matthies, 2007).
ເສັ້ນທາງຕະຫຼາດຄາດຄະເນການຈະເລີນເຕີບໂຕຂອງເທັກໂນໂລຍີເຫຼົ່ານີ້, ໂດຍມີ vector ການຄົ້ນຄວ້າທີ່ແນໃສ່ການເສີມຄວາມຢືດຢຸ່ນຂອງລະບົບ, ຕົວຊີ້ວັດຄວາມແມ່ນຍໍາ, ແລະການປັບຕົວ (MarketsandMarkets, 2020).

Ring laser gyroscope
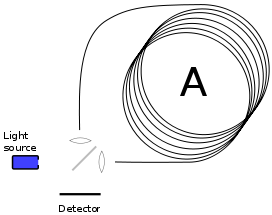
ແຜນຜັງຂອງເສັ້ນໃຍ-ອອບຕິກ-gyroscope ໂດຍອີງໃສ່ຜົນກະທົບ sagnac
ອ້າງອີງ:
- Chatfield, AB, 1997.ພື້ນຖານຂອງການນໍາທາງ Inertial ຄວາມຖືກຕ້ອງສູງ.ຄວາມຄືບໜ້າຂອງນັກອາວະກາດ ແລະ ການບິນອະວະກາດ, ສະບັບທີ.174. Reston, VA: ສະຖາບັນການບິນ ແລະນັກອາວະກາດອາເມຣິກາ.
- Kersey, AD, et al., 1996. "Fiber Optic Gyros: 20 Years of Technology Advancement," inການດໍາເນີນງານຂອງ IEEE,84(12), ໜ້າ 1830-1834.
- Maimone, MW, Cheng, Y., ແລະ Matthies, L., 2007. "Visual Odometry on the Mars Exploration Rovers - ເຄື່ອງມືເພື່ອຮັບປະກັນການຂັບຂີ່ທີ່ຖືກຕ້ອງ ແລະຮູບພາບວິທະຍາສາດ,"IEEE Robotics & Automation Magazine,14(2), ໜ້າ 54-62.
- MarketsandMarkets, 2020. "ຕະຫຼາດລະບົບນໍາທາງ Inertial ໂດຍຊັ້ນ, ເຕັກໂນໂລຊີ, ຄໍາຮ້ອງສະຫມັກ, ອົງປະກອບ, ແລະພາກພື້ນ - ການຄາດຄະເນທົ່ວໂລກເຖິງ 2025."
ປະຕິເສດຄວາມຮັບຜິດຊອບ:
- ພວກເຮົາປະກາດໃນນີ້ວ່າຮູບພາບບາງຢ່າງທີ່ສະແດງຢູ່ໃນເວັບໄຊທ໌ຂອງພວກເຮົາແມ່ນເກັບກໍາມາຈາກອິນເຕີເນັດແລະວິກິພີເດຍເພື່ອຈຸດປະສົງຂອງການສຶກສາແລະການແບ່ງປັນຂໍ້ມູນຕື່ມອີກ.ພວກເຮົາເຄົາລົບສິດທິຊັບສິນທາງປັນຍາຂອງຜູ້ສ້າງຕົ້ນສະບັບທັງຫມົດ.ຮູບພາບເຫຼົ່ານີ້ໄດ້ຖືກນໍາໃຊ້ໂດຍບໍ່ມີຈຸດປະສົງເພື່ອຜົນປະໂຫຍດທາງການຄ້າ.
- ຖ້າຫາກທ່ານເຊື່ອວ່າເນື້ອໃນການນໍາໃຊ້ລະເມີດລິຂະສິດຂອງທ່ານ, ກະລຸນາຕິດຕໍ່ຫາພວກເຮົາ.ພວກເຮົາເຕັມໃຈທີ່ຈະໃຊ້ມາດຕະການທີ່ເຫມາະສົມ, ລວມທັງການລົບລ້າງຮູບພາບຫຼືການສະຫນອງສະຖານທີ່ທີ່ເຫມາະສົມ, ເພື່ອຮັບປະກັນການປະຕິບັດຕາມກົດຫມາຍວ່າດ້ວຍຊັບສິນທາງປັນຍາ.ຈຸດປະສົງຂອງພວກເຮົາແມ່ນເພື່ອຮັກສາເວທີທີ່ອຸດົມສົມບູນດ້ວຍເນື້ອຫາ, ຍຸຕິທໍາ, ແລະເຄົາລົບສິດທິຊັບສິນທາງປັນຍາຂອງຜູ້ອື່ນ.
- ກະລຸນາຕິດຕໍ່ພວກເຮົາໂດຍຜ່ານວິທີການຕິດຕໍ່ຕໍ່ໄປນີ້,email: sales@lumispot.cn.ພວກເຮົາໃຫ້ຄຳໝັ້ນສັນຍາທີ່ຈະດຳເນີນການໃນທັນທີເມື່ອໄດ້ຮັບແຈ້ງການໃດໜຶ່ງ ແລະ ຮັບປະກັນການຮ່ວມມື 100% ເພື່ອແກ້ໄຂບັນຫາດັ່ງກ່າວ.
ເວລາປະກາດ: ຕຸລາ-18-2023