ຈອງສື່ສັງຄົມຂອງພວກເຮົາສຳລັບໂພສທີ່ວ່ອງໄວ
ໃນຍຸກສະໄໝແຫ່ງຄວາມກ້າວໜ້າທາງດ້ານເຕັກໂນໂລຊີທີ່ກ້າວໜ້າ, ລະບົບນຳທາງໄດ້ກາຍມາເປັນເສົາຄ້ຳພື້ນຖານ, ຂັບເຄື່ອນຄວາມກ້າວໜ້າຫຼາຍຢ່າງ, ໂດຍສະເພາະໃນຂະແໜງການທີ່ສຳຄັນຕໍ່ຄວາມແມ່ນຍຳ. ການເດີນທາງຈາກການນຳທາງເທິງສະຫວັນແບບພື້ນຖານໄປສູ່ລະບົບນຳທາງແບບ Inertial Navigation Systems (INS) ທີ່ຊັບຊ້ອນເປັນຕົວຢ່າງຂອງຄວາມພະຍາຍາມທີ່ບໍ່ຍອມແພ້ຂອງມະນຸດໃນການສຳຫຼວດ ແລະ ຄວາມແມ່ນຍຳທີ່ຈະແຈ້ງ. ການວິເຄາະນີ້ເຈາະເລິກເຂົ້າໄປໃນກົນໄກທີ່ສັບສົນຂອງ INS, ສຳຫຼວດເຕັກໂນໂລຊີທີ່ທັນສະໄໝຂອງ Fiber Optic Gyroscopes (FOGs) ແລະ ບົດບາດສຳຄັນຂອງ Polarization ໃນການຮັກສາວົງແຫວນເສັ້ນໄຍ.
ພາກທີ 1: ການຖອດລະຫັດລະບົບນຳທາງແບບ Inertial (INS):
ລະບົບນຳທາງແບບ Inertial (INS) ໂດດເດັ່ນເປັນເຄື່ອງຊ່ວຍນຳທາງແບບອັດຕະໂນມັດ, ຄິດໄລ່ຕຳແໜ່ງ, ທິດທາງ ແລະ ຄວາມໄວຂອງຍານພາຫະນະໄດ້ຢ່າງແມ່ນຍຳ, ໂດຍບໍ່ຂຶ້ນກັບສັນຍານພາຍນອກ. ລະບົບເຫຼົ່ານີ້ປະສານສົມທົບເຊັນເຊີການເຄື່ອນໄຫວ ແລະ ເຊັນເຊີການໝູນວຽນ, ໂດຍປະສົມປະສານກັບຮູບແບບການຄິດໄລ່ສຳລັບຄວາມໄວເບື້ອງຕົ້ນ, ຕຳແໜ່ງ ແລະ ທິດທາງ.
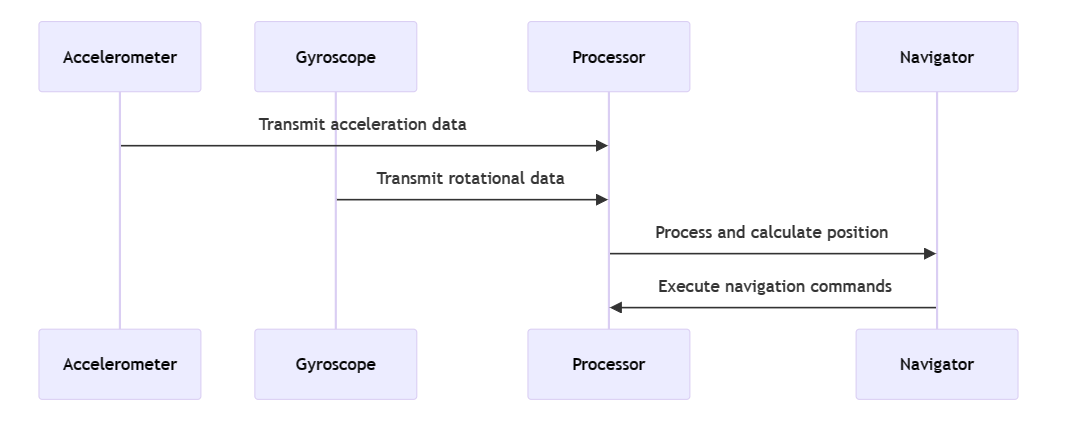
INS ແບບແຜນປະກອບມີສາມອົງປະກອບຫຼັກຄື:
· ເຄື່ອງວັດຄວາມເລັ່ງ: ອົງປະກອບທີ່ສຳຄັນເຫຼົ່ານີ້ລົງທະບຽນຄວາມເລັ່ງເສັ້ນຊື່ຂອງຍານພາຫະນະ, ໂດຍແປການເຄື່ອນໄຫວໃຫ້ເປັນຂໍ້ມູນທີ່ວັດແທກໄດ້.
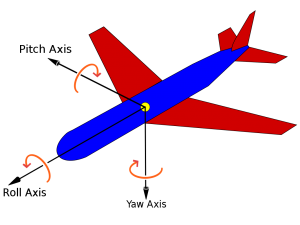
· ໄຈໂຣສະໂຄບ: ສ່ວນປະກອບສຳຄັນສຳລັບການກຳນົດຄວາມໄວມຸມ, ອົງປະກອບເຫຼົ່ານີ້ແມ່ນສຳຄັນຕໍ່ການວາງທິດທາງຂອງລະບົບ.
· ໂມດູນຄອມພິວເຕີ: ສູນກາງເສັ້ນປະສາດຂອງ INS, ປະມວນຜົນຂໍ້ມູນຫຼາຍດ້ານເພື່ອໃຫ້ໄດ້ການວິເຄາະຕຳແໜ່ງໃນເວລາຈິງ.
ພູມຕ້ານທານຂອງ INS ຕໍ່ກັບການລົບກວນຈາກພາຍນອກເຮັດໃຫ້ມັນຂາດບໍ່ໄດ້ໃນຂະແໜງການປ້ອງກັນປະເທດ. ເຖິງຢ່າງໃດກໍ່ຕາມ, ມັນຕ້ອງປະເຊີນກັບ 'ການເລື່ອນລອຍ' - ການເສື່ອມໂຊມຂອງຄວາມຖືກຕ້ອງເທື່ອລະກ້າວ, ເຊິ່ງຈຳເປັນຕ້ອງມີວິທີແກ້ໄຂທີ່ຊັບຊ້ອນເຊັ່ນ: ການລວມຕົວຂອງເຊັນເຊີເພື່ອຫຼຸດຜ່ອນຄວາມຜິດພາດ (Chatfield, 1997).
ພາກທີ 2. ການເຄື່ອນໄຫວການເຮັດວຽກຂອງ Gyroscope ເສັ້ນໄຍແກ້ວນຳແສງ:
ເຄື່ອງວັດແທກການໝຸນຂອງເສັ້ນໄຍແກ້ວນຳແສງ (FOGs) ປະກາດຍຸກສະໄໝແຫ່ງການຫັນປ່ຽນໃນການຮັບຮູ້ການໝູນວຽນ, ໂດຍນຳໃຊ້ປະໂຫຍດຈາກການແຊກແຊງຂອງແສງ. ດ້ວຍຄວາມແມ່ນຍຳເປັນຫຼັກ, FOGs ແມ່ນມີຄວາມສຳຄັນຫຼາຍຕໍ່ການສະຖຽນລະພາບ ແລະ ການນຳທາງຂອງຍານອະວະກາດ.
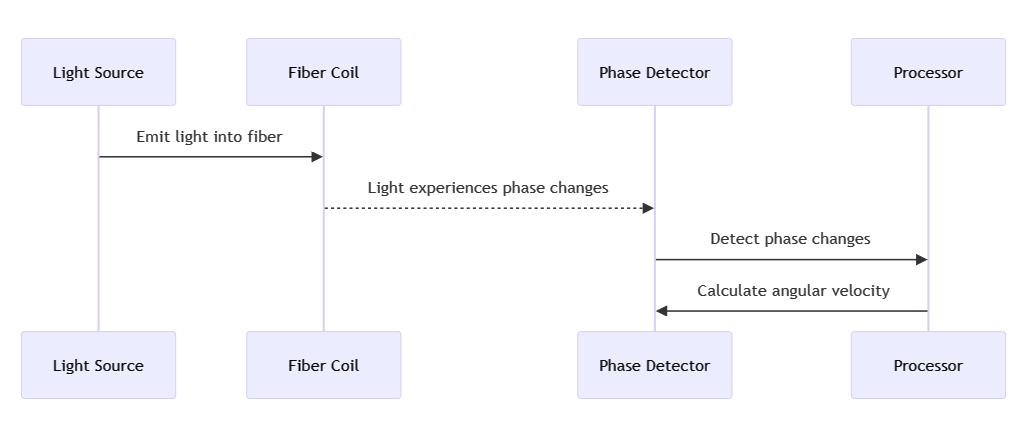
FOGs ເຮັດວຽກຕາມຜົນກະທົບຂອງ Sagnac, ບ່ອນທີ່ແສງສະຫວ່າງ, ເຊິ່ງແລ່ນໄປໃນທິດທາງກົງກັນຂ້າມພາຍໃນຂົດລວດເສັ້ນໄຍໝູນວຽນ, ສະແດງອອກເຖິງການປ່ຽນໄລຍະທີ່ກ່ຽວຂ້ອງກັບການປ່ຽນແປງຂອງອັດຕາການໝູນວຽນ. ກົນໄກທີ່ມີຄວາມລະອຽດອ່ອນນີ້ແປເປັນຕົວຊີ້ວັດຄວາມໄວມຸມທີ່ຊັດເຈນ.
ສ່ວນປະກອບທີ່ສຳຄັນປະກອບດ້ວຍ:
· ແຫຼ່ງກຳເນີດແສງ: ຈຸດເລີ່ມຕົ້ນ, ໂດຍປົກກະຕິແມ່ນເລເຊີ, ເລີ່ມຕົ້ນການເດີນທາງຂອງແສງທີ່ສອດຄ່ອງກັນ.
· ຂົດລວດໄຟເບີທໍ່ສົ່ງແສງທີ່ມ້ວນເປັນຂົດລວດ, ຍືດຍາວວິຖີການເຄື່ອນທີ່ຂອງແສງ, ດັ່ງນັ້ນຈຶ່ງຂະຫຍາຍຜົນກະທົບຂອງ Sagnac.
· ເຄື່ອງກວດຈັບແສງ: ອົງປະກອບນີ້ຮັບຮູ້ຮູບແບບການແຊກແຊງທີ່ສັບສົນຂອງແສງ.
ພາກທີ 3: ຄວາມສຳຄັນຂອງໂພລາໄລເຊຊັນ ການຮັກສາວົງໂຄຈອນເສັ້ນໄຍ:
ການຮັກສາໂພລາໄລເຊຊັນ (PM) ເສັ້ນໄຍ, ເຊິ່ງເປັນສິ່ງສຳຄັນສຳລັບ FOGs, ຮັບປະກັນສະຖານະພາບໂພລາໄລເຊຊັນຂອງແສງທີ່ເປັນເອກະພາບ, ເປັນຕົວກຳນົດຫຼັກໃນຄວາມແມ່ນຍຳຂອງຮູບແບບການແຊກແຊງ. ເສັ້ນໄຍພິເສດເຫຼົ່ານີ້, ຕໍ່ສູ້ກັບການກະຈາຍຮູບແບບໂພລາໄລເຊຊັນ, ເສີມສ້າງຄວາມອ່ອນໄຫວຂອງ FOG ແລະ ຄວາມຖືກຕ້ອງຂອງຂໍ້ມູນ (Kersey, 1996).
ການຄັດເລືອກເສັ້ນໄຍ PM, ເຊິ່ງຖືກກຳນົດໂດຍຄວາມຕ້ອງການດ້ານການດຳເນີນງານ, ຄຸນລັກສະນະທາງກາຍະພາບ, ແລະ ຄວາມກົມກຽວຂອງລະບົບ, ມີອິດທິພົນຕໍ່ຕົວຊີ້ວັດການປະຕິບັດໂດຍລວມ.
ພາກທີ 4: ການນຳໃຊ້ ແລະ ຫຼັກຖານທາງປະສົບການ:
FOGs ແລະ INS ພົບຄວາມສະທ້ອນໃນການນຳໃຊ້ທີ່ຫຼາກຫຼາຍ, ຕັ້ງແຕ່ການວາງແຜນການບິນແບບບໍ່ມີຄົນຂັບ ຈົນເຖິງການຮັບປະກັນສະຖຽນລະພາບຂອງໂຮງໜັງທ່າມກາງຄວາມບໍ່ແນ່ນອນຂອງສິ່ງແວດລ້ອມ. ຫຼັກຖານສະແດງເຖິງຄວາມໜ້າເຊື່ອຖືຂອງພວກມັນແມ່ນການນຳໃຊ້ພວກມັນໃນຍານ Mars Rovers ຂອງ NASA, ເຊິ່ງອຳນວຍຄວາມສະດວກໃຫ້ແກ່ການນຳທາງນອກໂລກທີ່ປອດໄພ (Maimone, Cheng, and Matthies, 2007).
ເສັ້ນທາງການຕະຫຼາດຄາດຄະເນຊ່ອງທາງທີ່ເພີ່ມຂຶ້ນຢ່າງໄວວາສຳລັບເຕັກໂນໂລຢີເຫຼົ່ານີ້, ໂດຍມີເວັກເຕີການຄົ້ນຄວ້າທີ່ແນໃສ່ເສີມສ້າງຄວາມຢືດຢຸ່ນຂອງລະບົບ, ເມທຣິກຄວາມແມ່ນຍໍາ, ແລະ ສະເປກຕຣຳການປັບຕົວ (MarketsandMarkets, 2020).

ໄຈໂຣສະໂຄບເລເຊີວົງແຫວນ
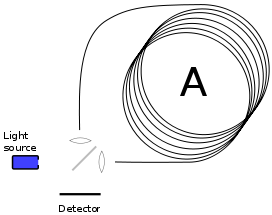
ແຜນວາດຂອງເຄື່ອງວັດແທກການເຄື່ອນທີ່ຂອງເສັ້ນໄຍແກ້ວນຳແສງໂດຍອີງໃສ່ຜົນກະທົບຂອງ sagnac
ເອກະສານອ້າງອີງ:
- ແຊດຟີວ, AB, 1997.ພື້ນຖານຂອງການນຳທາງແບບ Inertial ທີ່ມີຄວາມແມ່ນຍຳສູງ.ຄວາມຄືບໜ້າໃນວິທະຍາສາດການບິນ ແລະ ອະວະກາດ, ເຫຼັ້ມທີ 174. ເຣສຕັນ, ເວີຈິເນຍ: ສະຖາບັນວິທະຍາສາດການບິນ ແລະ ອະວະກາດອາເມລິກາ.
- Kersey, AD, ແລະ ອື່ນໆ, 1996. "ໄຍແກ້ວນຳແສງ: 20 ປີແຫ່ງຄວາມກ້າວໜ້າທາງດ້ານເຕັກໂນໂລຊີ," ໃນລາຍງານການປະຊຸມຂອງ IEEE,84(12), ໜ້າ 1830-1834.
- Maimone, MW, Cheng, Y., ແລະ Matthies, L., 2007. "ການວັດແທກໄລຍະທາງດ້ວຍສາຍຕາເທິງຍານສຳຫຼວດດາວອັງຄານ - ເຄື່ອງມືເພື່ອຮັບປະກັນການຂັບຂີ່ທີ່ຖືກຕ້ອງ ແລະ ການຖ່າຍພາບວິທະຍາສາດ,"ວາລະສານ IEEE Robotics & Automation,14(2), ໜ້າ 54-62.
- MarketsandMarkets, 2020. "ຕະຫຼາດລະບົບນຳທາງແບບ Inertial ຕາມລະດັບ, ເຕັກໂນໂລຊີ, ການນຳໃຊ້, ອົງປະກອບ ແລະ ພາກພື້ນ - ການຄາດຄະເນທົ່ວໂລກເຖິງປີ 2025."
ຂໍ້ປະຕິເສດຄວາມຮັບຜິດຊອບ:
- ພວກເຮົາຂໍປະກາດວ່າຮູບພາບບາງຮູບທີ່ສະແດງຢູ່ໃນເວັບໄຊທ໌ຂອງພວກເຮົາແມ່ນໄດ້ລວບລວມມາຈາກອິນເຕີເນັດ ແລະ Wikipedia ເພື່ອຈຸດປະສົງໃນການສົ່ງເສີມການສຶກສາ ແລະ ການແລກປ່ຽນຂໍ້ມູນ. ພວກເຮົາເຄົາລົບສິດທິຊັບສິນທາງປັນຍາຂອງຜູ້ສ້າງຕົ້ນສະບັບທັງໝົດ. ຮູບພາບເຫຼົ່ານີ້ຖືກນຳໃຊ້ໂດຍບໍ່ມີເຈດຕະນາເພື່ອຜົນປະໂຫຍດທາງການຄ້າ.
- ຖ້າທ່ານເຊື່ອວ່າເນື້ອຫາໃດໆທີ່ນຳໃຊ້ນັ້ນລະເມີດລິຂະສິດຂອງທ່ານ, ກະລຸນາຕິດຕໍ່ຫາພວກເຮົາ. ພວກເຮົາເຕັມໃຈທີ່ຈະໃຊ້ມາດຕະການທີ່ເໝາະສົມ, ລວມທັງການລຶບຮູບພາບ ຫຼື ການໃຫ້ຄວາມກ່ຽວຂ້ອງທີ່ເໝາະສົມ, ເພື່ອຮັບປະກັນການປະຕິບັດຕາມກົດໝາຍ ແລະ ລະບຽບການກ່ຽວກັບຊັບສິນທາງປັນຍາ. ເປົ້າໝາຍຂອງພວກເຮົາແມ່ນເພື່ອຮັກສາເວທີທີ່ອຸດົມສົມບູນດ້ວຍເນື້ອຫາ, ຍຸດຕິທຳ ແລະ ເຄົາລົບສິດທິຊັບສິນທາງປັນຍາຂອງຄົນອື່ນ.
- ກະລຸນາຕິດຕໍ່ຫາພວກເຮົາຜ່ານວິທີການຕິດຕໍ່ຕໍ່ໄປນີ້,email: sales@lumispot.cnພວກເຮົາມຸ່ງໝັ້ນທີ່ຈະດຳເນີນການທັນທີເມື່ອໄດ້ຮັບແຈ້ງການໃດໆ ແລະ ຮັບປະກັນການຮ່ວມມື 100% ໃນການແກ້ໄຂບັນຫາດັ່ງກ່າວ.
ເວລາໂພສ: ວັນທີ 18 ຕຸລາ 2023